

Laboratuvar ortamında harici ışık kaynakları sayesinde bağımsız bir şekilde uçabilen en hafif kanatlı robot başarıyla üretildi.
Otonom (kullanıcıya ihtiyaç duymadan) uçabilen minik robotlar tozlaşma, arama – kurtarma görevleri, yüzey araştırmalarıyla beraber iklim ve çevre çalışmaları gibi pek çok alanda kullanım potansiyeli taşıyor.
Robot böcek araştırmalarının altında yatan fikir kendi kendine yetebilen ve gruplar hâlinde koordine olabilen otonom hava taşıtları geliştirmek. Elbette boyutlar ve ağırlık azaldıkça çoklu görevleri başarılı bir şekilde gerçekleştirebilen robotlar tasarlamak oldukça güçleşiyor.
Araştırmacılar hedeflerine ulaşmak için öncelikli olarak robot gövdesini oluşturacak tüm öğeleri mümkün olabilecek en kusursuz şekilde bir araya getirmeliler. Daha sonra gövdeye entegre edilecek akıllı algılayıcılar ve elektronik sistemlerle çevrenin dinamik bir şekilde algılanmasını ve böylece uçuş kontrollerinin otonom olarak gerçekleşmesini sağlamalılar. Son adımdaysa robotlardan oluşacak sürülerden uyum içinde hareket eden görev birimleri oluşturmalılar.
Arı ve uçan böceklerden esinlenerek tasarlanan robotların en büyük sorunu ise uçmak için ihtiyaç duydukları enerjinin sağlanması. Böcekler kuvvetli kaslarında depolanan enerji sayesinde kanatlarını çırparak havada hareketleri için gerekli olan itiş gücünü elde ediyorlar. Robotlarda ise bu zorlu sürecin görece daha az verimli ve daha ağır olan harici pillerle başarılması gerekiyor.

Araştırmacıların böceklerden esinlenerek geliştirdikleri ve RoboBee adını verdikleri bu çok küçük ölçekli robotlarla ilgili araştırmalar beraberinde yeni gelişmeleri de getiriyor.
RoboBee X-Wing
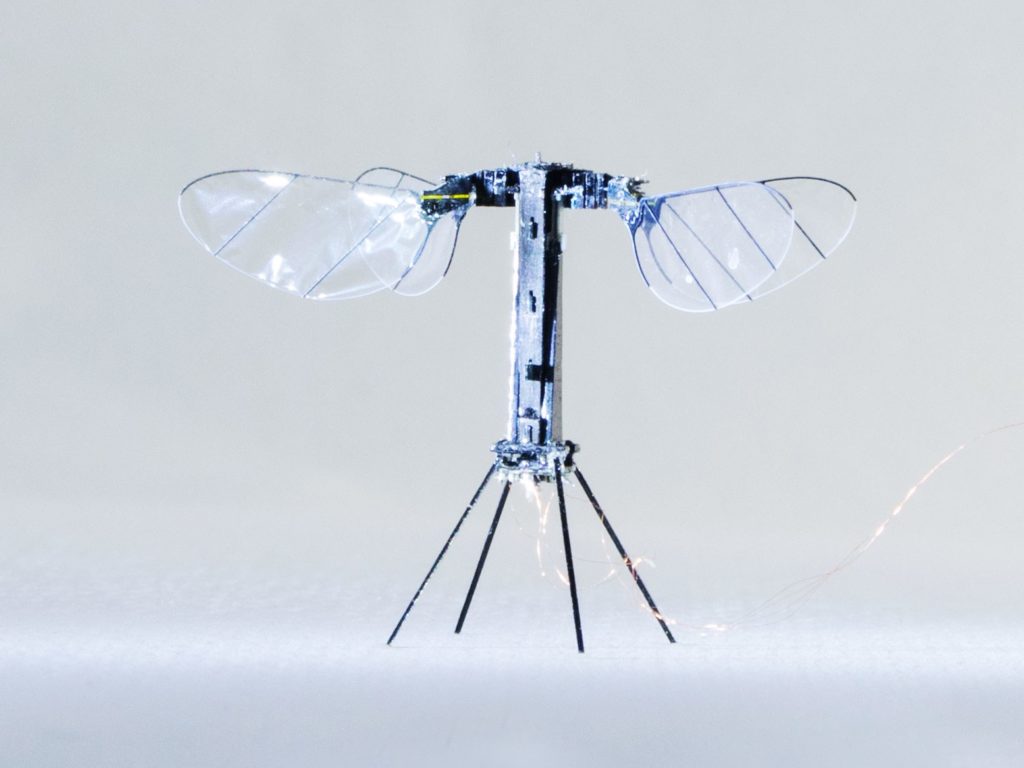
Son geliştirilen robot böceğin adı ise RoboBee X-Wing. En önemli özelliği herhangi bir kablolu bağlantı olmadan uçabilmek olan bu robot böcek 259 mg gibi oldukça düşük bir ağırlığa sahip. Karbon fiber ve polyester kullanılarak üretilen dört kanadını saniyede 170 kez çırpabilen 6,5 cm boyundaki bu küçük robotun kanat açıklığı ise 3,5 cm.

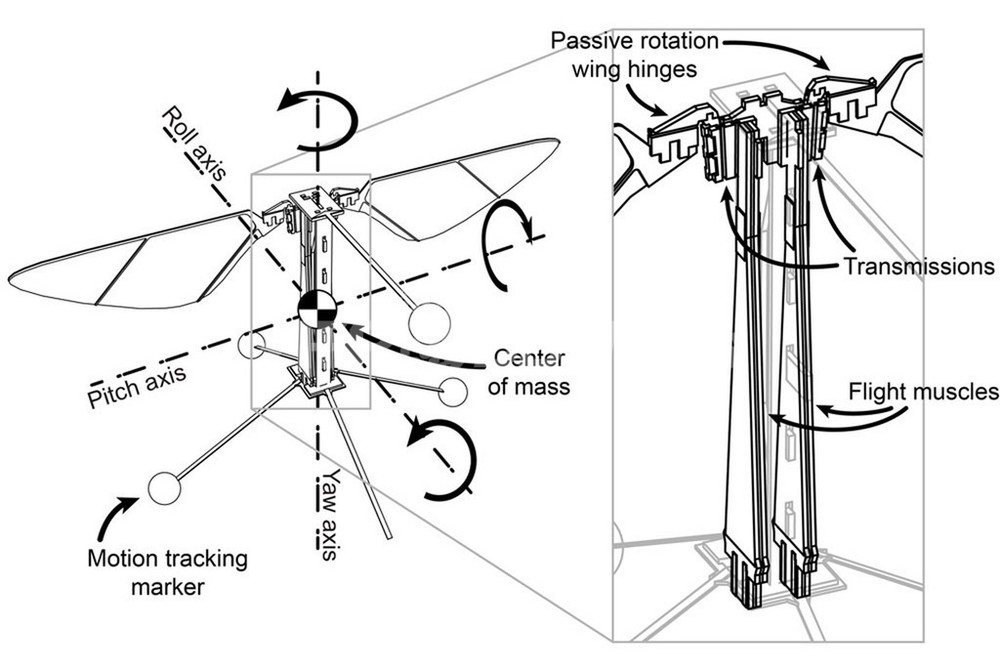
Kanatlar içlerinden akım geçtiğinde büzülerek kas işlevi gören iki adet plaka tarafından kontrol ediliyor. Robotun enerjisi kanatların yukarısına yerleştirilen ve her biri 10 mg ağırlığa sahip altı adet güneş hücresi tarafından sağlanıyor.
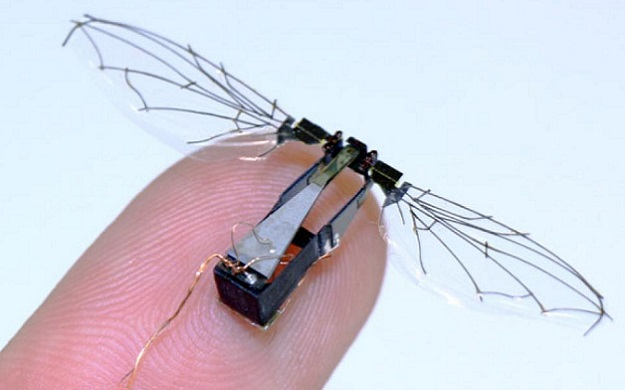
İleri mühendislik uygulamaları ile oldukça küçük boyutlarda ve çok hafif olarak tasarlanan robotun ağırlığı bir kağıt ataşının yaklaşık dörtte biri kadar. Kablolarla herhangi bir güç kaynağına bağlı olmaması sayesinde robot atalarına göre daha bağımsız bir şekilde hareket edebiliyor. Araştırmacılar robotun yapay kaslarında depolayabileceği gücü en yüksek seviyeye ulaştırmak ve sistemin genel verimliliğini artırmak için çalışmalara devam ediyorlar.
Robotun laboratuvar ortamındaki uçuşu halojen ve LED ışıkları sayesinde gerçekleşiyor. Doğal güneş ışığı yoğunluğunun üç katına ihtiyaç duyan robotun açık havada uçabilmesi şu anda mümkün gözükmüyor. Bu sorunun çözümü için araştırmalar devam ediyor.
Laboratuvarda gerçekleştirilen deneme uçuşları sadece birkaç saniye sürdü. Enerji depolama problemleri bulunduğunu ve yeterli güneş ışığı olmaması durumunda robotun yavaşlayıp sonunda düşeceğini belirten araştırmacılar, yapacakları çalışmalarla güneş hücrelerini ve devreleri iyileştirerek bu sorunu aşabileceklerini düşünüyorlar.
Mühendislik alanındaki gelişmeler araştırmacıları hedeflerine her gün biraz daha yaklaştırıyor. Bu küçük robotların kendi enerjilerini elde edebilecek hâlde tasarlanması oldukça büyük bir gelişme sayılıyor. Böylece gerçek hayatta otonom olarak kullanılmalarının önündeki önemli bir engel ortadan kaldırılmış oluyor.
Robotun ilerde küçük alanlarda manevra yapabilecek ve böylece çevre araştırma görevlerinde etkili bir şekilde kullanılabilecek şekilde geliştirilmesi hedefleniyor. Boyutlarına göre oldukça hafif olan RoboBee X-Wing’in gelecek versiyonlarına entegre edilecek algılama mekanizmaları sayesinde açık havada otonom kabiliyete sahip olması amaçlanıyor.
Kaynakça: Nature , Teknoreset , Taylorhopkinson






Yorum Yap